当前位置:首页 > 产品知识
时间:2024-05-15
步进电机又称为脉冲电动机或阶跃电动机,它根据输入的脉冲信号,每改变一次励磁状态就前进一定的角度,励磁状态不变时则保持—定位置静止。由此,步进电机可以将输入的脉冲信号转化为对应的角位移进行输出。通过控制输入脉冲的数量可以准确确定输出的角位移以实现定位的功能;而通过控制输入脉冲的频率可以准确控制输出的角速度而达调速的目的。因此在需要准确定位或调速控制时均可考虑使用步进电机。
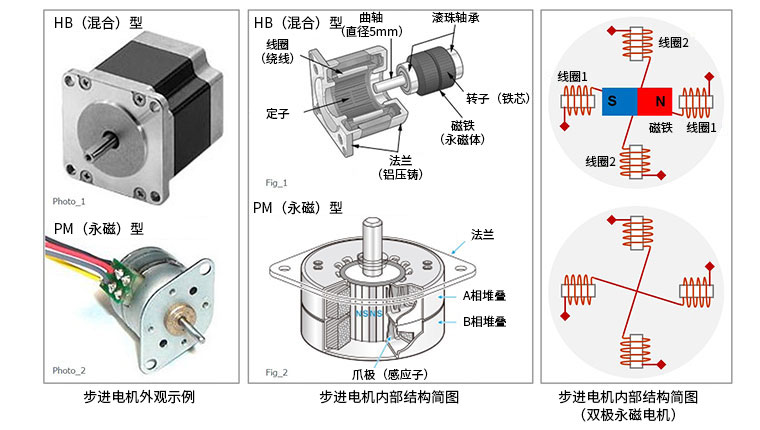
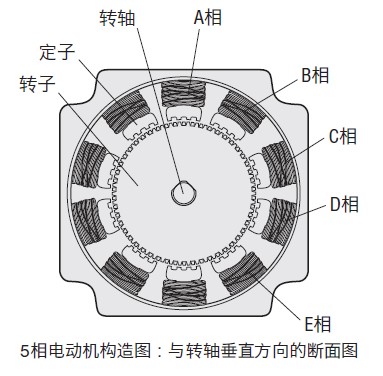
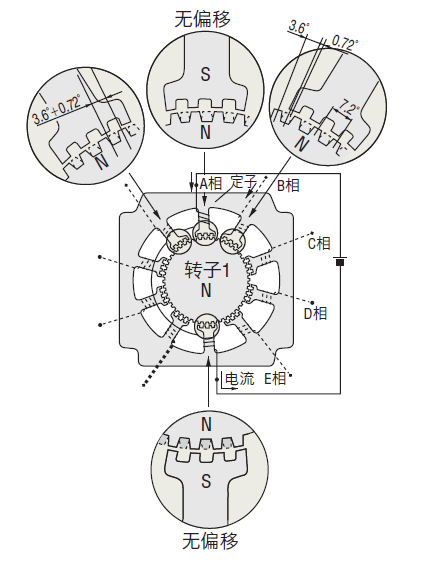
步进电机有反应式(VR型)、永磁式(PM型)、混合式(HB型)三种类型。永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5°或15°,多半用于价格低廉的消费型产品。反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和震动都很大,已被淘汰。混合式步进是指混合了永磁式和反应式的优点,它又分为两相、三相和五相,两相步进角一般为1.8°,三相步距角为0.9°,而五相步进角一般为0.72°。
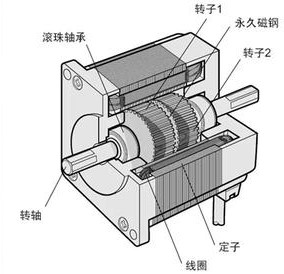
进电机由转子(转子铁芯、永磁体、转轴、滚珠轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿;三相电机的定子有9个大齿,45个小齿,转子有50个小齿。
步进电机无法直接连通电源工作,也无法直接接收电脉冲信号,它必须通过特殊的接口—步进电机驱动器来实现和电源、控制器的交互。步进电机驱动器一般由环形分配器,及功率放大电路组成。环形分配器接收来自控制器的控制信号。每接收到一个脉冲信号环形分配器的输出就会转换—次,因此,脉冲信号的有无和频率就可以决定步进电机转速的高低、加速还是减速启动还是停止。环形分配器还必须监测控制器的方向信号,从而决定其输出状 态的转换是正序或反序,从而确定步进电机的转向。
步进电机的主要参数包括:机座号、相数、步距角、保持转矩(静力矩)、定位转矩、额定电流。